
Екипът по роботика на Xiaomi наскоро постигна голям пробив във въплътения интелект и представи най-новия си резултат от изследването, TacRefineNet, на 5 февруари.
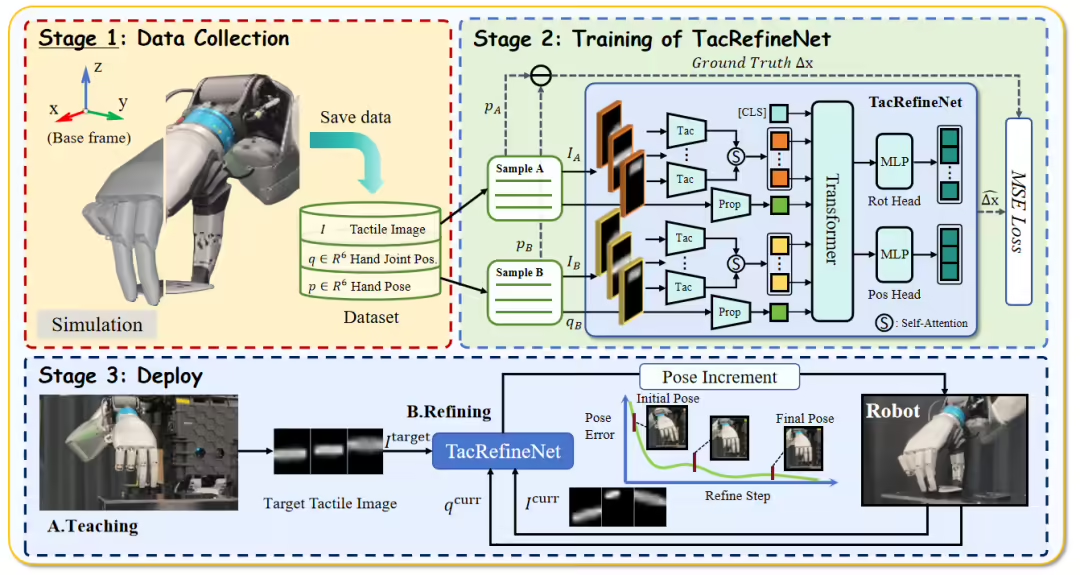
TacRefineNet е рамка с общо предназначение, която разчита единствено на тактилно усещане – без визия или обектни 3D модели – за извършване на усъвършенстване на поза на ниво милиметър по време на хващане. Основните му характеристики включват:
- Не е необходимо зрение: Изградена върху тактилни сензори с висока пространствена разделителна способност, системата не се влияе от условията на осветление или визуална оклузия, което позволява надеждно възприятие при сложни сценарии на контакт.
- Усъвършенстване на милиметрово ниво: Чрез сливане на тактилна обратна връзка с няколко пръста с проприоцептивна информация, моделът води до прецизна конвергенция на позата, намалявайки грешките при хващане до милиметрова скала.
- Без 3D модели на обекти: Рамката елиминира зависимостта от предишни геометрични модели, като преформулира сложните корекции на хващане като проблем с подравняването на тактилното пространство.
- Един модел, множество задачи: Един модел може да се справи с фини настройки за различни компоненти в автомобилното производство, работейки стабилно както в симулационни, така и в реални среди.
- Обобщение към неизвестни обекти: Без допълнително обучение, моделът поддържа силна устойчивост при работа с невиждани преди, но геометрично подобни обекти, дори при динамични смущения.
- Управляван от целта контрол: Системата поддържа произволни пози за хващане на целта без специфично за задачата преобучение, което позволява истинско plug-and-play фино манипулиране.

Тази иновация е насочена към дългогодишното предизвикателство „последната миля“ в роботизираната манипулация в реалния свят и отваря нови възможности за индустриална автоматизация.
Тъй като технологията на роботиката напредва бързо, тактилното възприятие все повече се признава като критичен мост между интелигентните агенти и физическия свят. Хората могат лесно да изпълняват деликатни задачи – като белене на яйце – благодарение на силно развитото си усещане за допир. Предоставянето на роботи с подобни тактилни способности се превърна в ключова посока за преодоляване на настоящите технически затруднения.

Определящата характеристика на TacRefineNet е способността му да постига усъвършенстване на хващане на ниво милиметър, използвайки само тактилно въвеждане, изцяло без визуална помощ или 3D модели на обекти.
Използвайки тактилни сензори с висока разделителна способност и сензорно сливане на няколко пръста, системата последователно ограничава грешките при хващане до милиметров диапазон. Както в симулирани, така и в реални тестове, TacRefineNet демонстрира силно и стабилно представяне.
Трябва да се отбележи, че един обучен модел може да се справи с фини задачи за хващане на множество компоненти в автомобилните фабрични настройки, без да се налага повторно обучение за конкретни задачи – предоставяйки истинска използваемост извън кутията.
Обширното валидиране чрез симулация и експерименти с реални роботи показа, че моделът може бързо да прецизира различни първоначални пози на хващане към целевите състояния, постигайки средни позиционни грешки на ниво милиметър.
Дори когато позициите и ориентацията на обектите се променят често, системата може да извършва прецизни корекции в реално време чрез непрекъсната тактилна обратна връзка. По-впечатляващо е, че TacRefineNet проявява силни способности за обобщение, като успешно манипулира непознати обекти с подобни геометрични характеристики.
Този пробив е възможен от дълбоката интеграция на данни, алгоритми и хардуер. От страна на данните екипът изгради висококачествен тактилен симулатор, използвайки физическия двигател MuJoCo за точно моделиране на отговорите на контактната сила. Алгоритмично TacRefineNet приема цялостна мултимодална архитектура за обучение, която интегрира тактилно усещане с множество пръсти, проприоцепция и информация за пространствено действие. На хардуерния фронт, тактилни сензори с висока разделителна способност бяха вградени в сръчни роботизирани върхове на пръстите, включващи разстояние между контактните точки от само 1,1 милиметра, което позволява на системата да улавя фините повърхностни деформации.
Екипът по роботика на Xiaomi публикува публично технически подробности и експериментални видеоклипове, като в бъдеще ще бъдат обявени още резултати от изследвания.
Източник: IT Home
Source link
Like this:
Like Loading…
Нашия източник е Българо-Китайска Търговско-промишлена палaта